Ant Group Releases LingBot-VLA — a pragmatic Vision-Language-Action foundation model for real-world robots
On January 28, 2026, Ant Group’s embodied-AI unit, Robbyant, publicly released LingBot-VLA, an open-source Vision-Language-Action (VLA) foundation model designed to be a “universal brain” for real-world robotic manipulation. The announcement—published alongside model code, a technical report, and evaluation assets—marks a significant step in making large-scale embodied intelligence research and deployment more accessible to robotics labs and product teams worldwide.
Below I unpack what LingBot-VLA is, how it was trained, why its design choices matter, how it performed in benchmarks and real robots, and what this release could mean for the future of embodied AI and robotics at scale.
What is LingBot-VLA?
LingBot-VLA is a foundation model that unifies perception (vision and depth), language understanding, and action generation for robot manipulation tasks. Practically, it lets a robot reason about visual scenes, interpret language prompts or instructions, and produce sequences of action representations that can be translated into low-level control for manipulators. Unlike narrow, task-specific controllers, LingBot-VLA is trained to generalize across multiple morphologies and manipulation tasks—aiming to reduce the heavy engineering and per-robot retraining that typically blocks real-world deployment.
Technically, the model builds on a multimodal backbone (reported to be based on Qwen-2.5-VL in the release notes), integrates a flow-matching action expert, and is explicitly designed to be depth-aware by distilling features from a separate spatial perception model (LingBot-Depth). This combined stack—perception, action, and world modeling in companion releases—creates an end-to-end foundation for robotic intelligence.
Scale and training data — pragmatic, real-world focus
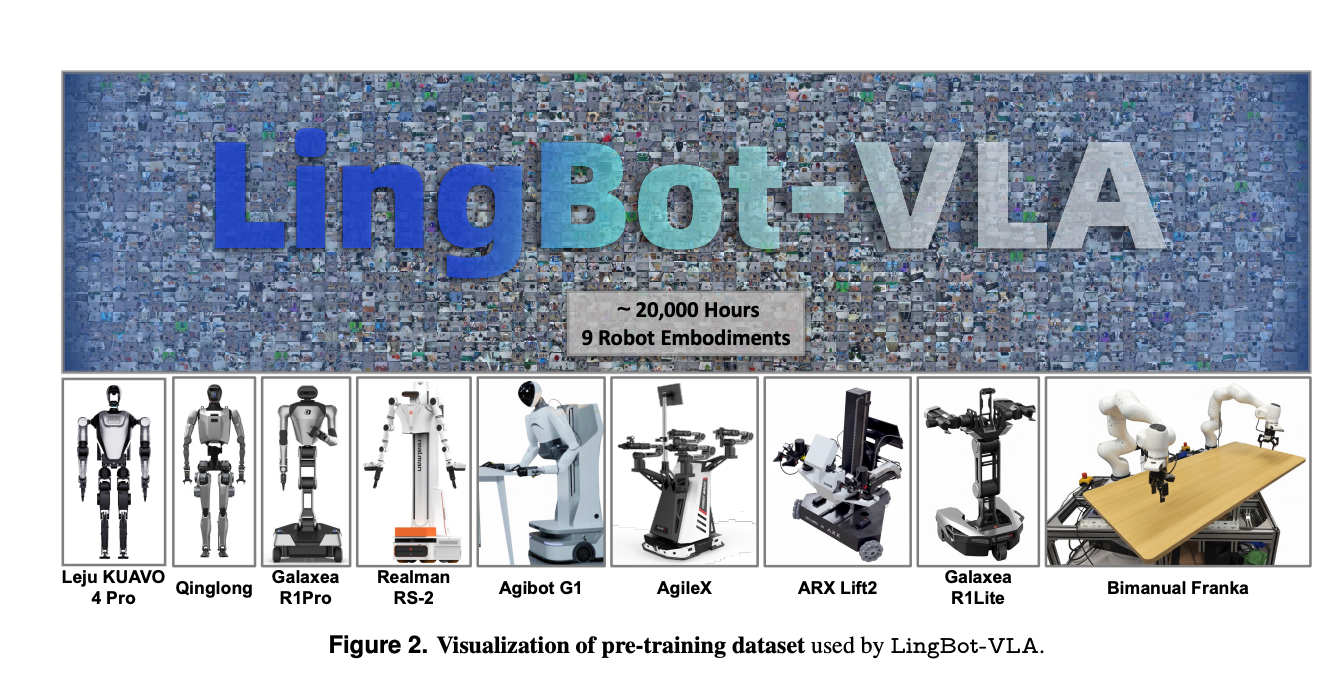
What sets LingBot-VLA apart from many prior academic or demo-focused systems is the sheer scale and nature of its training data. According to the project’s technical report and GitHub release, the team trained the VLA model on roughly 20,000 hours of real-world dual-arm teleoperation data collected across nine different robot embodiments. This pragmatic, real-data approach aims to produce robust cross-morphology generalization: the same model should be able to reason about tasks even when the robot’s kinematics or gripper geometry changes.
There are two important implications here. First, teleoperation data captures the messy, physical interactions and edge cases that simulation often misses—slippage, subtle contact dynamics, occlusions, and operator corrections. Second, training across nine robot morphologies gives the model exposure to diverse physical affordances, which improves generalization when a new robot must perform a previously unseen task. The release claims strong cross-robot performance on standard benchmarks and real hardware.
Architecture and key components
LingBot-VLA’s public materials describe a few notable architectural choices:
-
Multimodal backbone: The model leverages a vision-language backbone (reported as Qwen-2.5-VL), which provides strong visual-language grounding and enables natural-language conditioned behaviors. Using an existing, well-tuned multimodal backbone accelerates training and allows researchers to focus compute on action modeling and fine-grained spatial reasoning.
-
Flow-matching action expert: For action prediction, the team incorporates flow-matching techniques to model continuous, multi-step action trajectories. This allows the model to generate smooth, physically plausible action sequences instead of discrete action tokens that may be brittle in contact-rich settings.
-
Depth-aware perception via distillation: LingBot-VLA’s visual tokens are aligned with a dedicated depth/completion expert (LingBot-Depth) through feature distillation. The result is improved 3-D spatial understanding—crucial for insertion, stacking, folding, and other geometry-sensitive tasks. In short: the model “sees” depth more intelligently than image-only systems.
-
Practical efficiency: The release emphasizes computational efficiency and deployment practicality—architectural tweaks, caching mechanisms, and training pipelines are described to keep inference tractable on robot compute stacks, and to lower the post-training adaptation cost that usually plagues real deployments.
Benchmarks and real-robot results
Robbyant’s technical report and accompanying coverage highlight strong results on both simulation and real-robot benchmarks. The authors report that LingBot-VLA outperformed peer models on the GM-100 real-robot benchmark and RoboTwin 2.0 simulations, demonstrating higher success rates and better long-horizon stability in manipulation tasks. The cross-morphology tests (adapting to robots from different manufacturers, e.g., Galaxea Dynamics and AgileX) are emphasized as proof of real-world viability.
What’s useful to note: benchmark gains here are meaningful for practitioners. Higher long-horizon success rates reduce human supervision and retry logic in deployment, and improved 3-D understanding reduces catastrophic failures during contact-rich tasks (like threading a connector or folding cloth). The team also published ablations showing the contribution of depth distillation and teleop-scale training to robustness.
Why open-sourcing matters
Ant Group’s decision to open-source LingBot-VLA and related assets (code, models, datasets/metadata, and tech reports) is strategically important for the broader robotics community. Historically, large robotics breakthroughs—especially those relying on expensive, proprietary teleoperation datasets and bespoke simulators—have been hard for academic labs and startups to reproduce. By publishing both model weights and a concrete recipe for training on real-world teleop data, Robbyant lowers the barrier for researchers and product teams to: (a) reproduce results, (b) benchmark on new hardware, and (c) iterate rapidly on safety and control layers.
Open-sourcing also accelerates ecosystem building: researchers can adapt the code to new robot arms, combine LingBot-VLA with custom controllers, or extend the dataset with their own teleoperation logs. The release therefore acts as an instigator for collaborative progress on embodied intelligence rather than a closed, corporate advantage. Several outlets noted this broader strategic push—Ant Group isn’t simply releasing one model, but publishing a family of models (Perception → VLA → World) that together form a practical robotics stack.
Practical adoption: who benefits and how
A variety of actors stand to gain from LingBot-VLA’s availability:
-
Robotics researchers and labs gain an off-the-shelf VLA baseline to compare against, lowering experimental overhead and enabling reproducible science.
-
Startups building automation for factories, warehouses, and service robots can use LingBot-VLA as a zero-to-one brain and iterate on control safeties and application-specific fine-tuning, thereby cutting costly data collection cycles.
-
Hardware vendors and integrators can evaluate cross-morphology performance and understand where hardware improvements (sensors, grippers) deliver the most ROI when paired with a shared intelligence model.
-
Education and community projects that lacked access to large teleop datasets can now explore embodied AI projects without starting from scratch.
That said, industrial adoption still requires careful integration—mapping the model’s high-level action outputs to safe low-level controllers, building robust perception pipelines for new environments, and satisfying regulatory or safety requirements in human-adjacent settings.
Limitations and open challenges
While LingBot-VLA is an important milestone, it doesn’t magically remove all the hard engineering in robotic deployment. A few caveats to keep in mind:
-
Sim-to-real and long-tail physical failure modes: Even large teleop datasets leave gaps—rare friction regimes, unusual materials, and unforeseen environment variations can still trigger failures. On-device sensing noise and mechanical wear also require continuous monitoring and adaptation.
-
Control translation and safety: The model outputs action representations; translating these into torques, impedance controllers, and safe collision-handling remains a nontrivial systems problem. Industrial deployments will need rigorous verification and supervisory controllers.
-
Data and privacy: Although the code and models are open, some teams may rely on proprietary teleop data for top performance. Ensuring privacy (e.g., when teleop logs contain sensitive visual information) and maintaining robust dataset curation are ongoing concerns.
-
Benchmarks vs. real tasks: While benchmarks show impressive gains, production tasks often require integration with scheduling, fleet management, and complex human workflows—areas outside the immediate scope of a VLA model.
The bigger picture: where this fits in embodied AI
Ant Group’s release of LingBot-VLA is part of a broader movement where large, multimodal foundation models move beyond passive perception and text to actively control and imagine within the physical world. By combining perception, language conditioning, action modeling, and companion world models (LingBot-World), Robbyant is adopting a modular but interoperable strategy: give robots the sensing, the reasoning, and a simulated imagination to plan ahead. This is conceptually similar to the “perception → policy → planner → world model” pipelines proposed in recent embodied AI literature, but executed at pragmatic scale with open artifacts for the community.
If these open models mature, we could see a faster democratization of robot capabilities: research groups, universities, and startups can build service and industrial robots with less upfront investment, while iterating on safety and specialization. At the same time, the field will need shared standards for evaluation, safety testbeds, and real-world challenge suites to ensure responsible progress.
How to get started (practical next steps)
For practitioners who want to experiment with LingBot-VLA today:
-
Visit the Robbyant GitHub repo: The release includes code, checkpoints, and a technical PDF describing data, architecture, and evaluation details. This is the authoritative starting point for reproducing baseline experiments.
-
Review the tech report: Read the linked arXiv paper or PDF to understand the dataset format, action tokenization, and depth-distillation pipeline—these details are crucial for adapting the model to new robots.
-
Run benchmarks in sim: Before trying on hardware, reproduce the reported simulation results (e.g., RoboTwin 2.0) to validate your pipeline. The repo provides scripts and baseline configs to help with this.
-
Plan safe hardware trials: Start with controlled environments and conservative supervisory controllers that can override risky actions. Logging and human-in-loop teleoperation remain essential for early testing.
-
Contribute back: If you extend datasets, improve controllers, or find failure modes, consider contributing to the open repo—community improvements will accelerate robust deployment for everyone.
Conclusion — a pragmatic milestone, not the finish line
LingBot-VLA is neither a panacea nor an overnight solution to all robotics problems. Instead, it’s a pragmatic and open contribution: a large, real-data trained VLA foundation model plus companion perception and world models that together lower the barrier to serious embodied AI experimentation and deployment. By publishing models, code, and documentation, Robbyant (within Ant Group) has given the research and industrial communities a concrete starting point to push robot capabilities from lab demos toward useful, real-world work.
For quick updates, follow our whatsapp –https://whatsapp.com/channel/0029VbAabEC11ulGy0ZwRi3j
https://bitsofall.com/what-is-clawdbot-ai-powered-robotic-worker/
https://bitsofall.com/ai-agent-action-decision-constraints/
Microsoft Unveils Maia 200 — The Inference Accelerator Built to Rethink Cloud AI Economics