Gemini Robotics 1.5: Bringing “Thinking” AI into the Physical World
Google DeepMind’s latest release in the Gemini Robotics family — Gemini Robotics 1.5, paired with its sibling Gemini Robotics-ER 1.5 — is being framed as a step change in how robots perceive, plan and act. Rather than simply responding to a single command, these models introduce agentic capabilities: the ability to build multi-step plans, consult external tools (like web search), and translate high-level plans into physical motor actions across different robot bodies. That combination — reasoning + tool use + action — is why DeepMind and multiple outlets are calling this a milestone toward “bringing AI agents into the physical world.” The Verge+1
What exactly are Gemini Robotics 1.5 and ER 1.5?
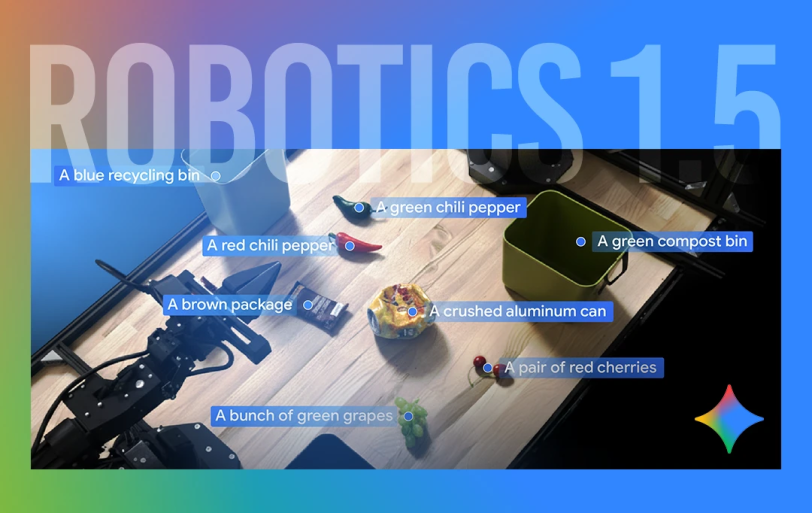
Gemini Robotics 1.5 is a vision-language-action (VLA) model designed to translate visual input and natural-language instructions into motor primitives and task execution for a physical robot. Its partner, Gemini Robotics-ER 1.5, is an embodied reasoning (ER) model: a vision-language model that plans, reasons about multi-step tasks, and — crucially — can call external tools (for example, Google Search) to gather situational knowledge before passing an executable plan to the action model. Together they form a planner (ER) + executor (1.5) stack intended to overcome limitations of single-model reactive systems. mint+1
DeepMind describes this as a generalist approach that works across “different shapes and sizes” of robot bodies — from dual-arm manipulators to humanoids — by enabling skill transfer between embodiments. That lets a behavior learned on one platform (say, a two-arm setup) be adapted to another (like a humanoid) using motion-transfer techniques and shared representations. Google Cloud Storage
Why this matters: planning, tool use, and cross-robot transfer
Three practical limitations have long held robotics back compared with web-based AI systems:
-
Single-instruction reactivity. Most robot controllers historically execute one command at a time and lack flexible planning.
-
Limited world knowledge. Robots are trained on local datasets and can’t easily consult up-to-date, location-specific information (e.g., local recycling rules or weather) when deciding what to do.
-
Embodiment bottleneck. Skills learned on one robot rarely transfer to others without expensive re-training.
Gemini Robotics-ER 1.5 addresses the first two points by constructing multi-step plans and actively using digital tools (web search) to augment situational awareness. Gemini Robotics 1.5 focuses on robustly converting those plans into motor actions and perceptual checks. The motion-transfer and multi-embodiment training strategies directly target the third problem by enabling knowledge and skill sharing across different physical platforms. Together, these shifts make robots more flexible, context-aware, and reusable across hardware. Google Developers Blog+1
Technical highlights (in plain terms)
-
Vision-Language-Action (VLA) architecture: Gemini Robotics 1.5 fuses visual perception, language understanding, and motor command generation so a robot can “see” an environment, understand a natural-language instruction, and produce stepwise actions. This is more integrated than pipelines that separate perception, planning and control into siloed modules. Google DeepMind
-
Embodied Reasoning with tool use: ER 1.5 can plan using internal reasoning and also consult external tools (e.g., Google Search) to retrieve up-to-date facts or local rules that affect task execution. For example, before packing for a trip it could check the weather and suggest an umbrella. This is a departure from closed datasets toward hybrid reasoning that includes internet knowledge at planning time. The Verge+1
-
Flexible “thinking budget”: Developer documentation mentions a tunable tradeoff between latency and accuracy — a “thinking budget” — so developers can balance fast, lower-cost decisions against slower, more accurate reasoning for difficult tasks. That’s useful for real-time robotics where latency matters. Google AI for Developers
-
Motion transfer / multi-embodiment learning: By representing skills at a higher level and using transfer techniques, behaviors learned on one robot can be mapped to others, reducing the need for massive retraining per platform. Google showed examples adapting skills from ALOHA2 and dual-arm Franka robots to humanoid platforms. The Verge+1
Compelling demos (what the models can do today)
In DeepMind’s demonstrations and press coverage, the Gemini Robotics stack performs several multi-step real-world tasks:
-
Sorting laundry by color and fabric type. The system recognizes garments, plans sorting categories, and executes pick-and-place operations. The Verge
-
Packing with context awareness. The ER model can check the weather and instruct the executor to pack an umbrella if rain is forecast. That shows how web knowledge can influence physical actions. mint
-
Sorting waste according to local recycling rules. Rather than hard-coding a city’s recycling categories, the planner can look them up and then instruct the executor how to sort items accordingly. The Verge
These demonstrations are important not because each one is novel in isolation, but because they combine perception, reasoning, tool use and action in a single flow — a capability more reminiscent of “agents” than simple controllers. Ars Technica
Availability and developer access
DeepMind is making Gemini Robotics-ER 1.5 available in preview through the Gemini API in Google AI Studio, aimed at developers who want to experiment with planning and perception capabilities. Gemini Robotics 1.5 (the action/executor model) is initially being rolled out to select partners, with on-device variants and SDKs mentioned for broader testing in trusted programs. The developer blog and API docs include quickstarts, Colab notebooks and references for getting started. Google Developers Blog+1
This staged access approach follows DeepMind’s typical pattern: make planning/perception available to a wide developer preview while gating on-robot execution more conservatively for safety and integration reasons. Robotics & Automation News
Safety, alignment and the “thinking before acting” promise
DeepMind emphasizes safety as an integral part of the design. The stack includes “high-level semantic reasoning about safety”, alignment with Gemini safety policies for human-facing behavior, and triggers for low-level collision-avoidance subsystems during execution. In other words, the models aim to reason about whether an action is appropriate before attempting it, while still relying on hard safety mechanisms embedded in hardware controllers. Google DeepMind
That said, experts and reporters caution that planning and natural-language explanations aren’t the same as human understanding. The system can still make mistakes — especially in fine manipulation and novel edge cases — and the broader robotics community continues to press for rigorous safety evaluation, adversarial testing and controlled rollouts. DeepMind’s release notes and technical report acknowledge dexterity, transfer robustness, and learning-from-observation as ongoing challenges. Google Cloud Storage+1

Realistic limitations — what Gemini Robotics 1.5 doesn’t instantly solve
-
High-precision dexterity. Manipulation at the level of a human hand (e.g., threading a needle) remains hard. The models improve planning and coarse motor control, but extreme fine motor skills still need hardware advances and specialized control policies. Google Cloud Storage
-
Robust long-horizon reasoning in messy environments. Open houses, cluttered workplaces and adversarial scenarios expose brittle perception or misaligned planning; real-world deployment requires extensive validation. Ars Technica
-
Full autonomy + accountability. Agentic behavior raises questions about responsibility when robots act in public spaces or workplaces. Legal, ethical and insurance frameworks will need to adapt as robots begin making more independent decisions. The Verge
-
Data and compute biases. Large internet-trained models will reflect training biases and can hallucinate plausible but incorrect facts — an issue amplified when those facts influence physical actions. ER 1.5’s reliance on tool calls must be coupled with verification steps to avoid unsafe actions based on spurious web content. Google AI for Developers
Industry implications: where this could matter most
-
Manufacturing and light assembly. Multi-step planning and cross-robot transfer reduce setup time for new production lines and allow a single model to support multiple robot types. Google Cloud Storage
-
Logistics and warehouses. Context-aware decisions (e.g., prioritizing fragile items, adapting packing orders) could improve throughput and reduce errors. The Verge
-
Healthcare and eldercare (assisted tasks). Robots that can plan and explain steps, and that respect safety constraints, could assist caregivers — although regulatory and safety validation will be essential before wide deployment. Ars Technica
-
Consumer robots / home assistants. Sorting laundry or handling basic household tasks is an obvious near-term consumer use case, though cost, reliability and privacy concerns will dictate adoption speed. mint
-
Research and robotics ecosystems. An API that exposes embodied reasoning capabilities will likely accelerate prototyping, lower the barrier for labs and startups, and catalyze innovation by combining web-scale knowledge with physical action. Google Developers Blog

A quick look at ethics, governance and workforce impacts
Agentic robots amplify longstanding debates: how to certify safety, how to assign liability when a robot follows an internet-sourced plan that harms someone, and how to manage labor displacement if robots take on more complex tasks. DeepMind’s focus on pre-action safety checks is an important start, but policy and governance must keep pace. Thoughtful deployment, stakeholder engagement, and clear standards will be crucial for public acceptance. Google DeepMind+1
The near future: what to watch
-
On-device releases and SDKs. Watch for broader availability of on-device variants and developer SDKs, which will signal a move toward lower-latency, privacy-sensitive deployments. The Verge
-
Benchmarks for multi-embodiment transfer. Expect academic and industrial teams to stress-test motion transfer claims and publish benchmarks showing how well skills generalize across robots. Google Cloud Storage
-
Safety audits and third-party evaluations. Independent audits and red-team exercises will be important signals that the technology can be trusted in real settings. Ars Technica
Conclusion — incremental leap, not instant revolution
Gemini Robotics 1.5 and Gemini Robotics-ER 1.5 are an important step toward more capable, context-aware robots. By combining embodied planning, internet tool use, and multi-embodiment action execution, DeepMind has moved robotics closer to agentic behavior: systems that can form plans, consult external knowledge, and act in the world with a degree of autonomy. That’s exciting — and useful — but it is also still an incremental advance in a long arc that includes hardware, control theory, safety engineering and regulation. The next 12–36 months will reveal whether these models translate into robust, real-world productivity gains or remain impressive demos that need more engineering and governance before broad adoption. The Verge+1
Sources and further reading
DeepMind’s model page and technical report, Google developer blog and coverage by outlets such as The Verge, Financial Times, Ars Technica and Robotics & Automation News informed this article. For the official technical details and to experiment with the ER preview, see Google AI Studio / Gemini API documentation and DeepMind’s blog. The Verge+3Google DeepMind+3Google Cloud Storage+3
For quick updates, follow our whatsapp –
https://whatsapp.com/channel/0029VbAabEC11ulGy0ZwRi3j
Apple’s chip redesign — why the company is rethinking silicon